OTTO ROBOT
OTTO Robot
Kiti bir otto yapabilmeniz için
hazırlanmış bir settir. Robotun hareket kabiliyeti, ses çıkarma kabiliyeti ve
ekstradan engel algılama kabiliyeti mevcuttur. Genel olarak dans eden robot
diye bilenen OTTO her türlü projeye uyum sağlayabilir.
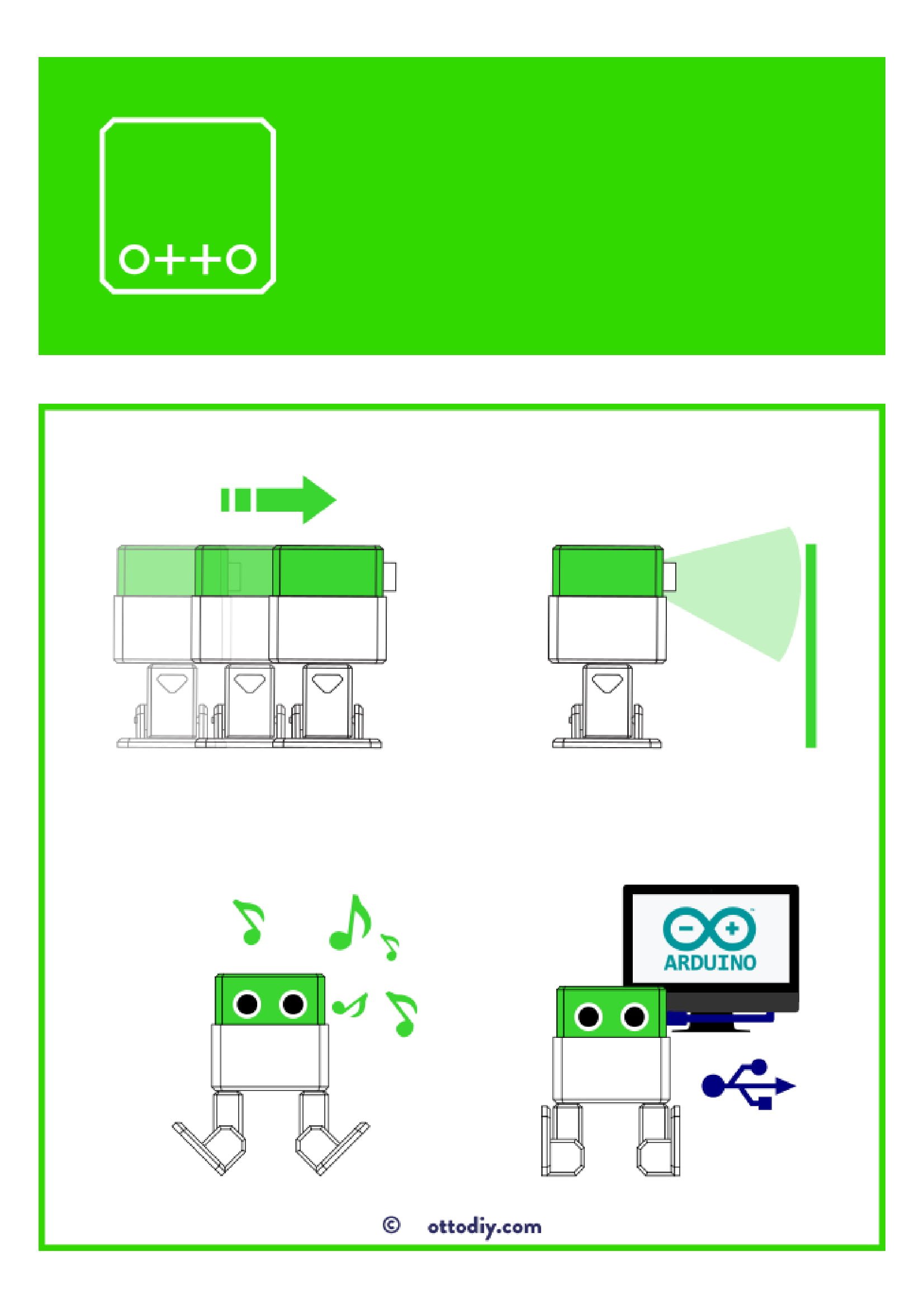
OTTO Robota
ait KOD BLOKLARI ve Arduino'nun kendi dili olan C Dili ile yazılmış hazır
kodları ile birlikte kolayca programlanabilmektedir. Kodlar programlanabilir
OTTO için giriş seviyesinde olup OTTO 'yu bir EĞİTİM ROBOTU yapmaktadır. Ayrıca
OTTO bluetooth modül ile telefon kontrollü bir
robotta olmaktadır. Kısaca OTTO Okul öncesi eğitim için bir Hareketli
Robot ilk ve orta öğretim için Kod Blokları ile programlanan hazır kit Lise ve
daha üst yaş grupları için Programlanabilir Robot olabilmektedir.
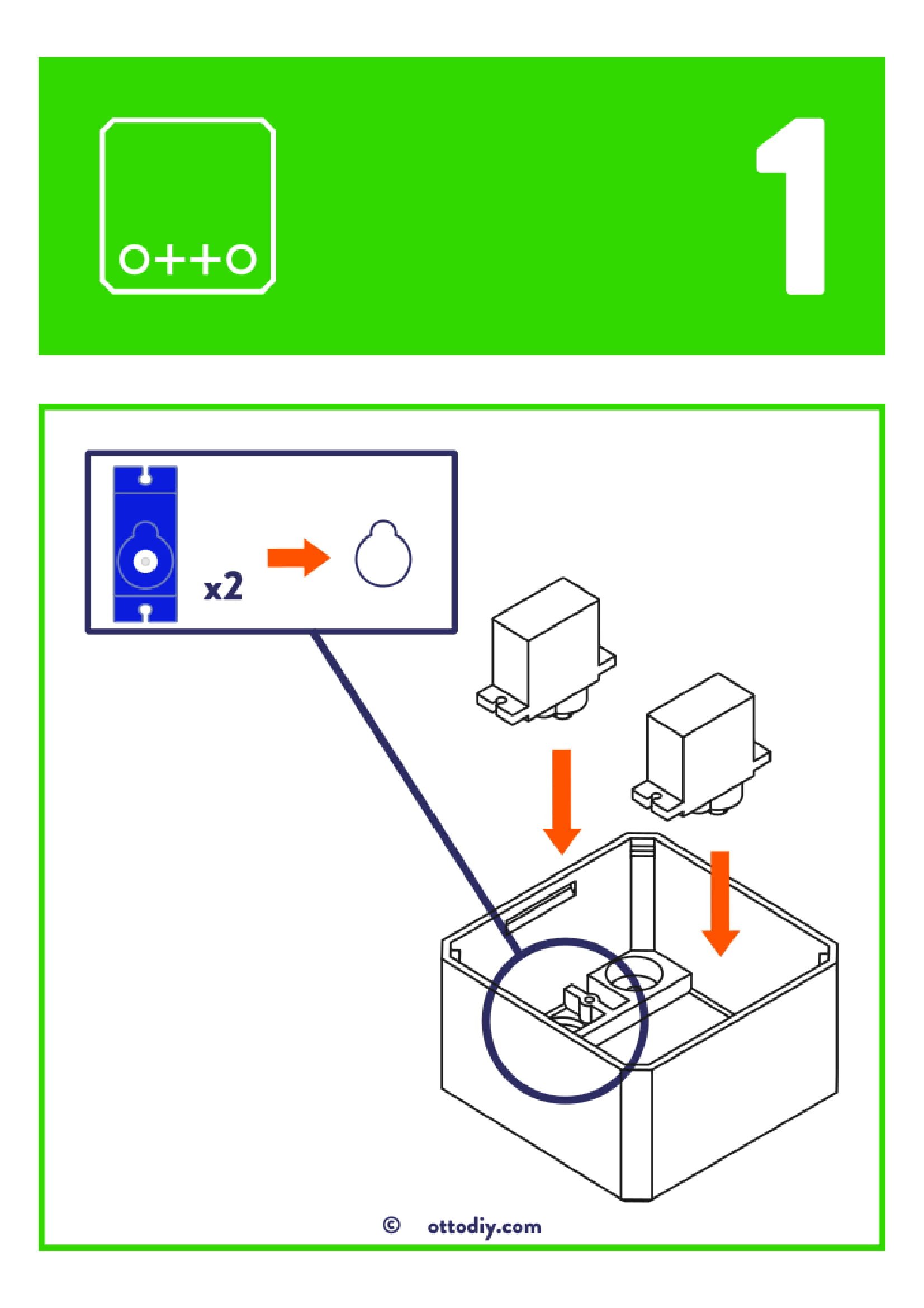
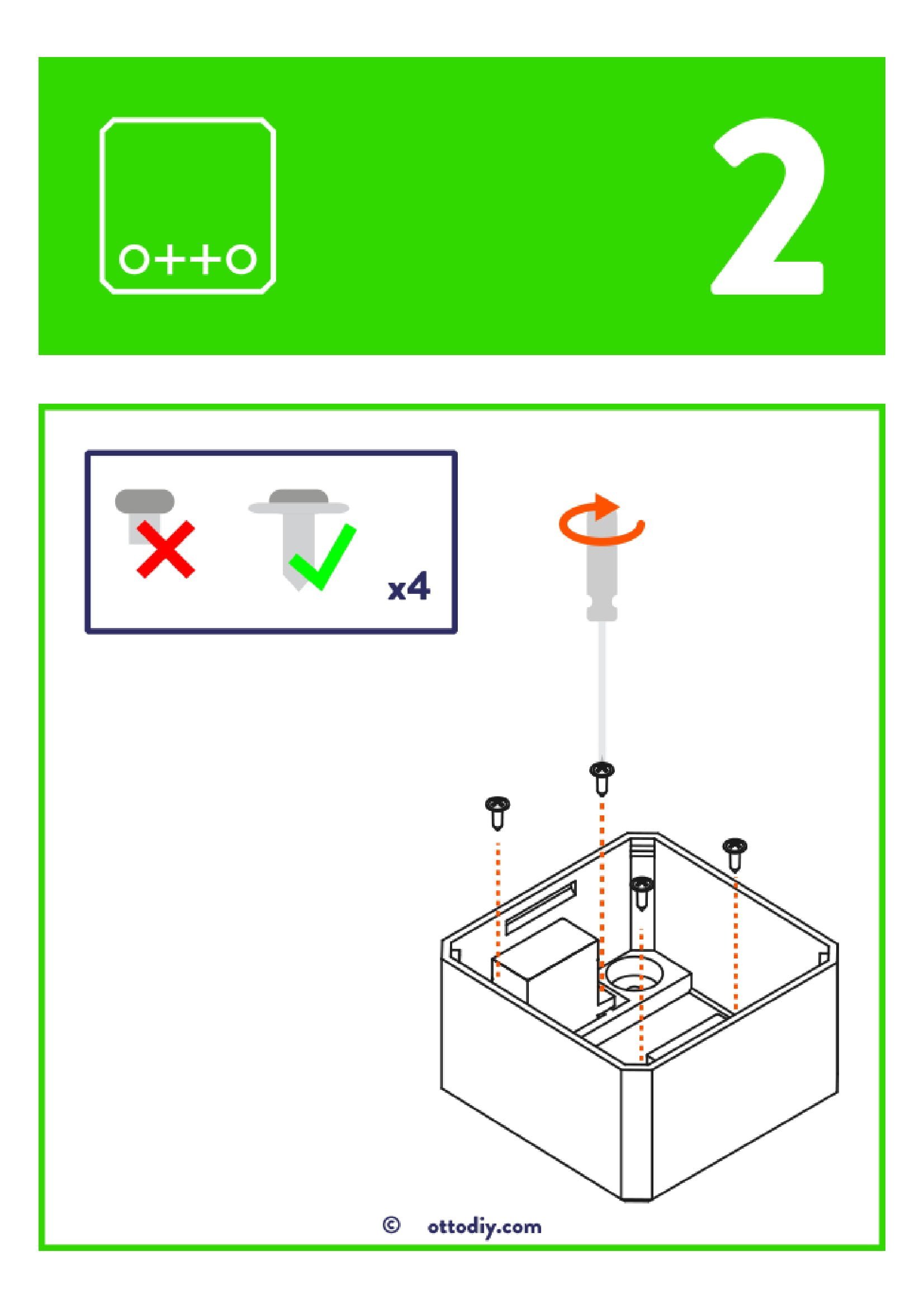
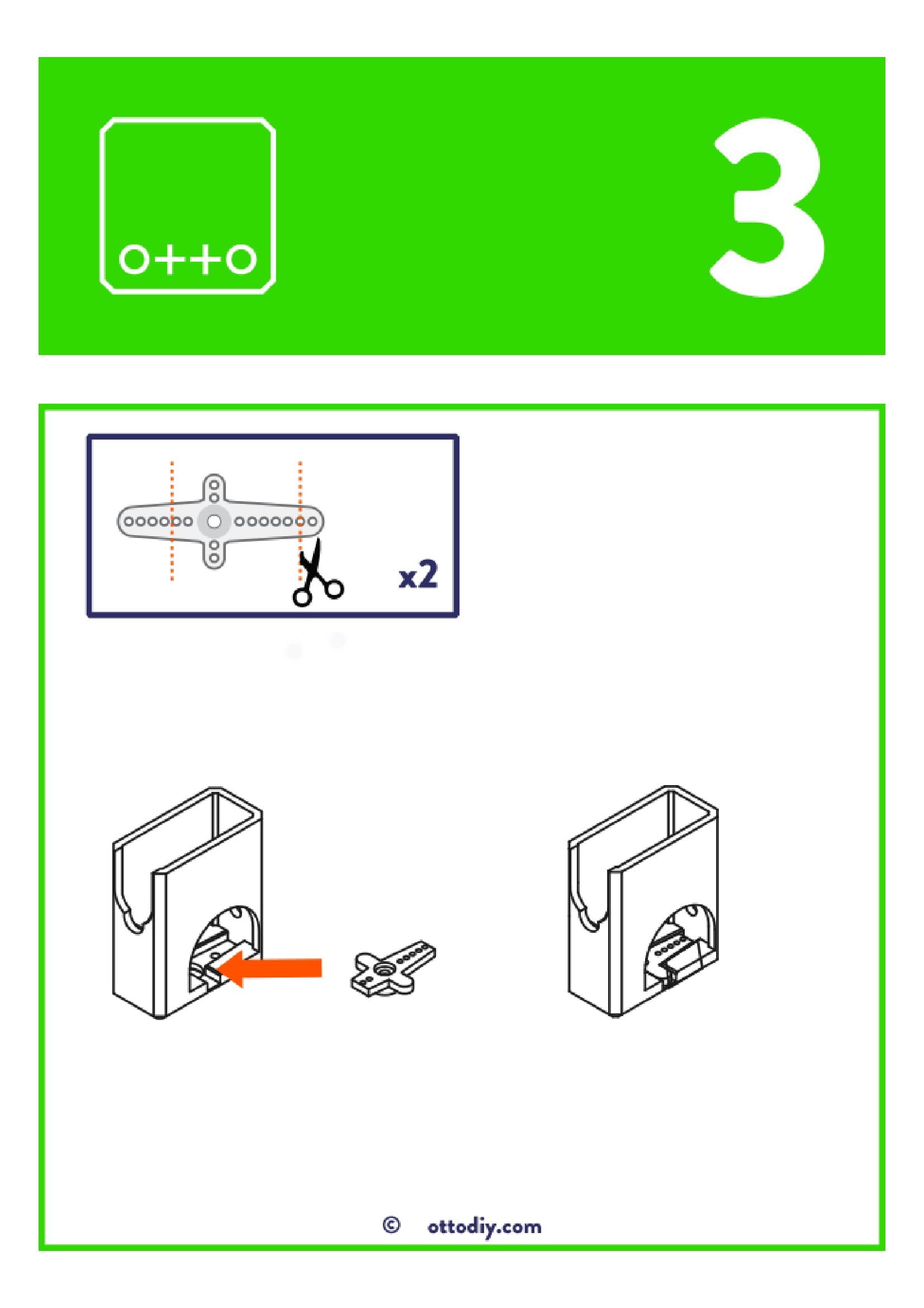
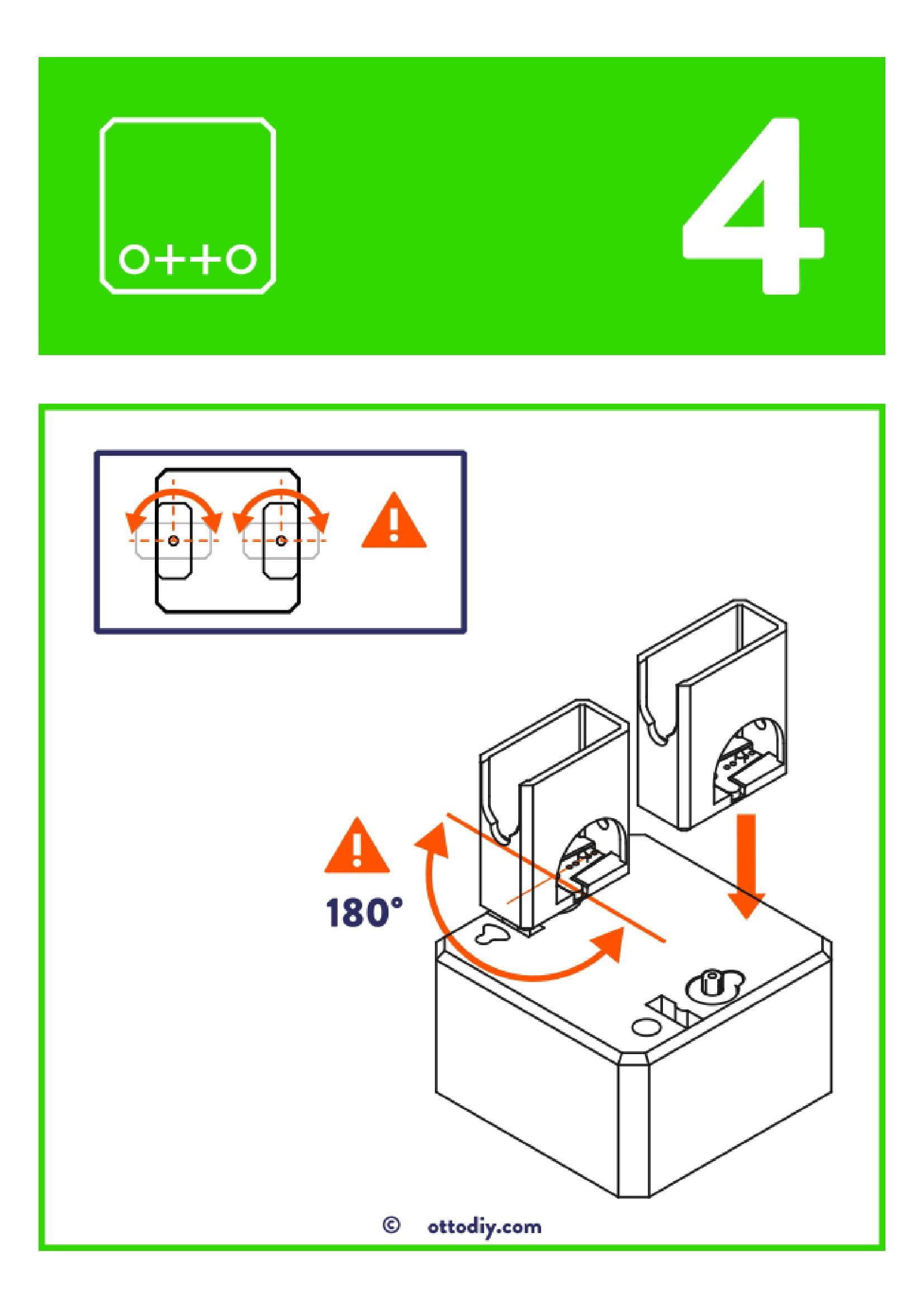
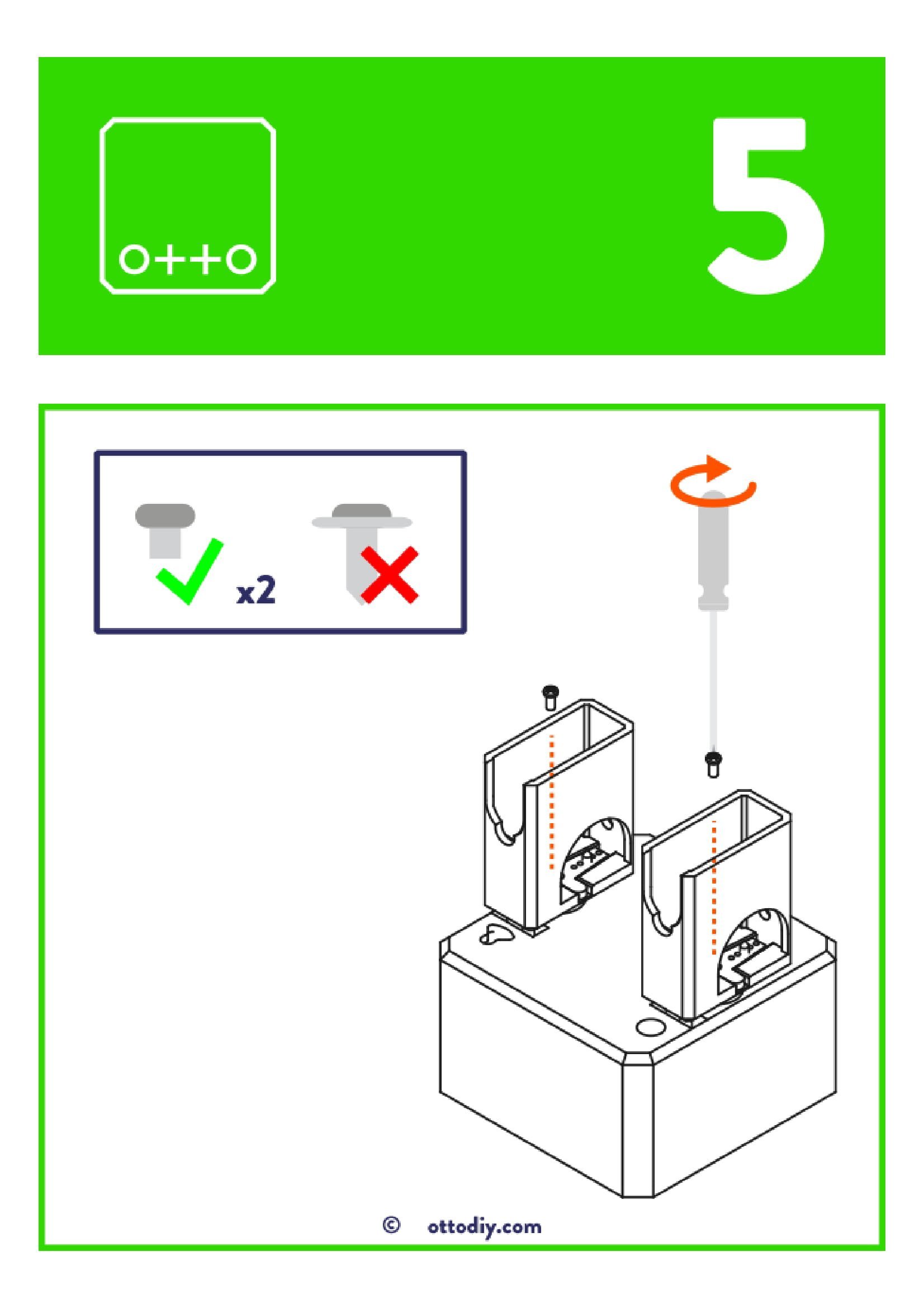
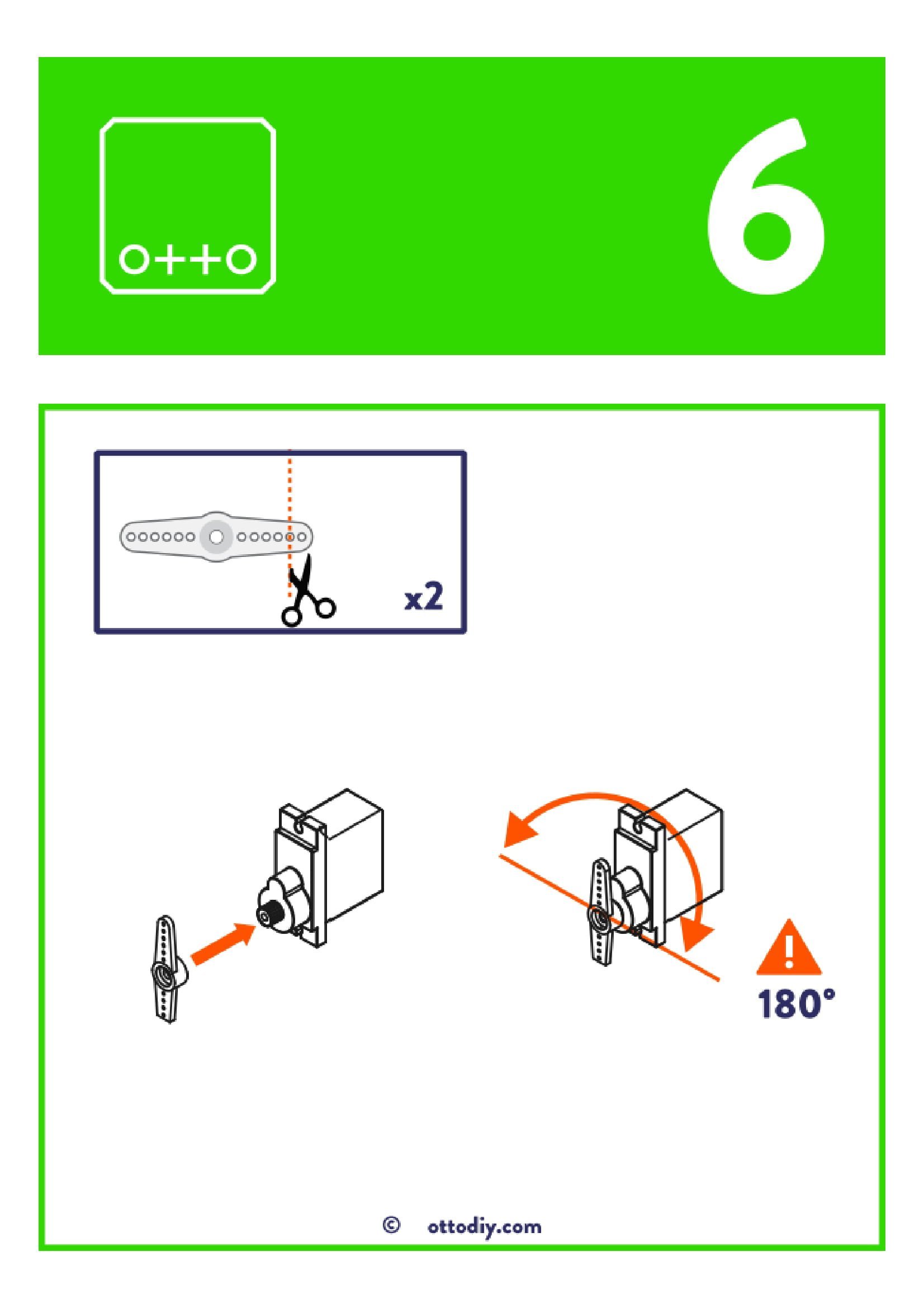
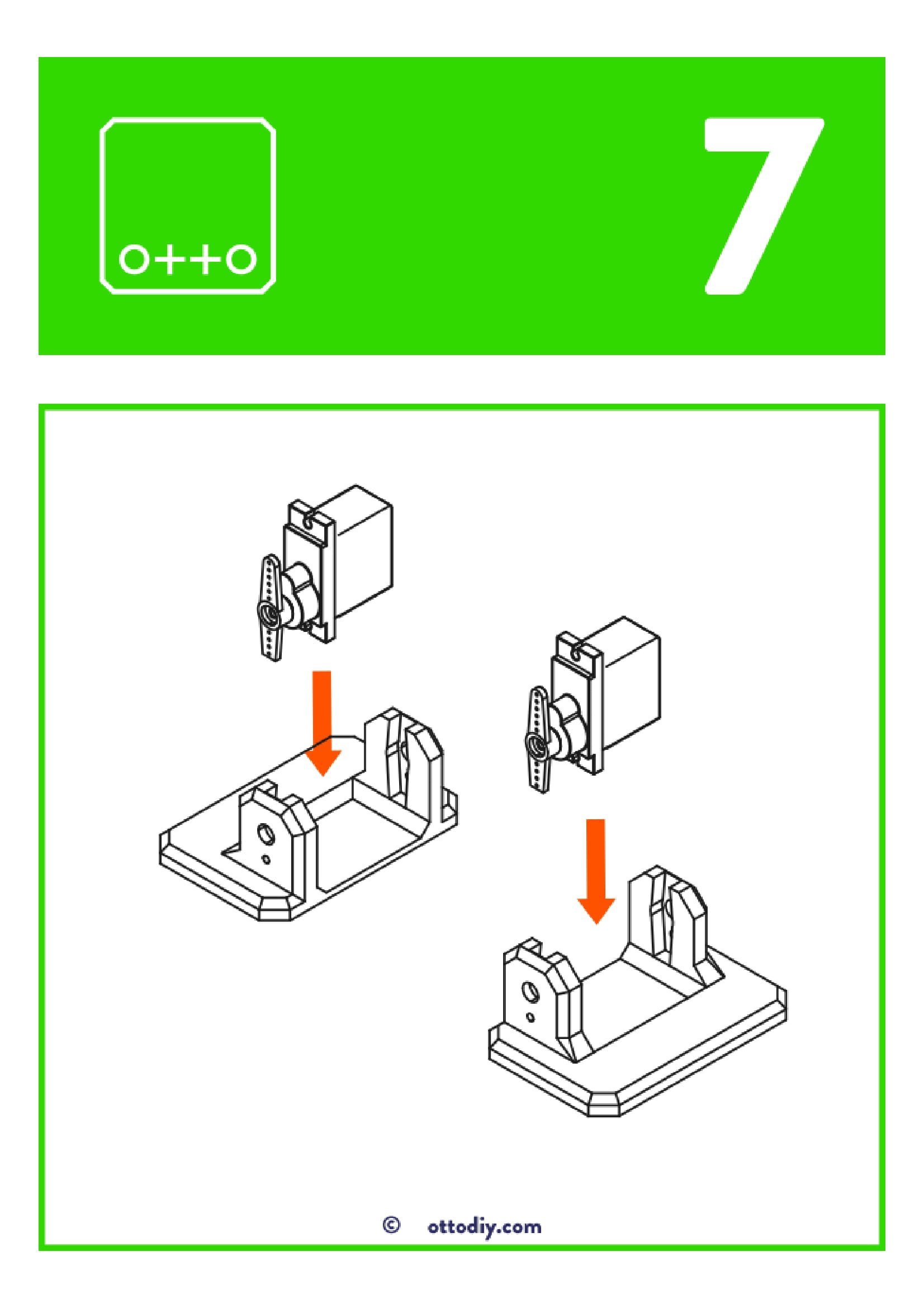
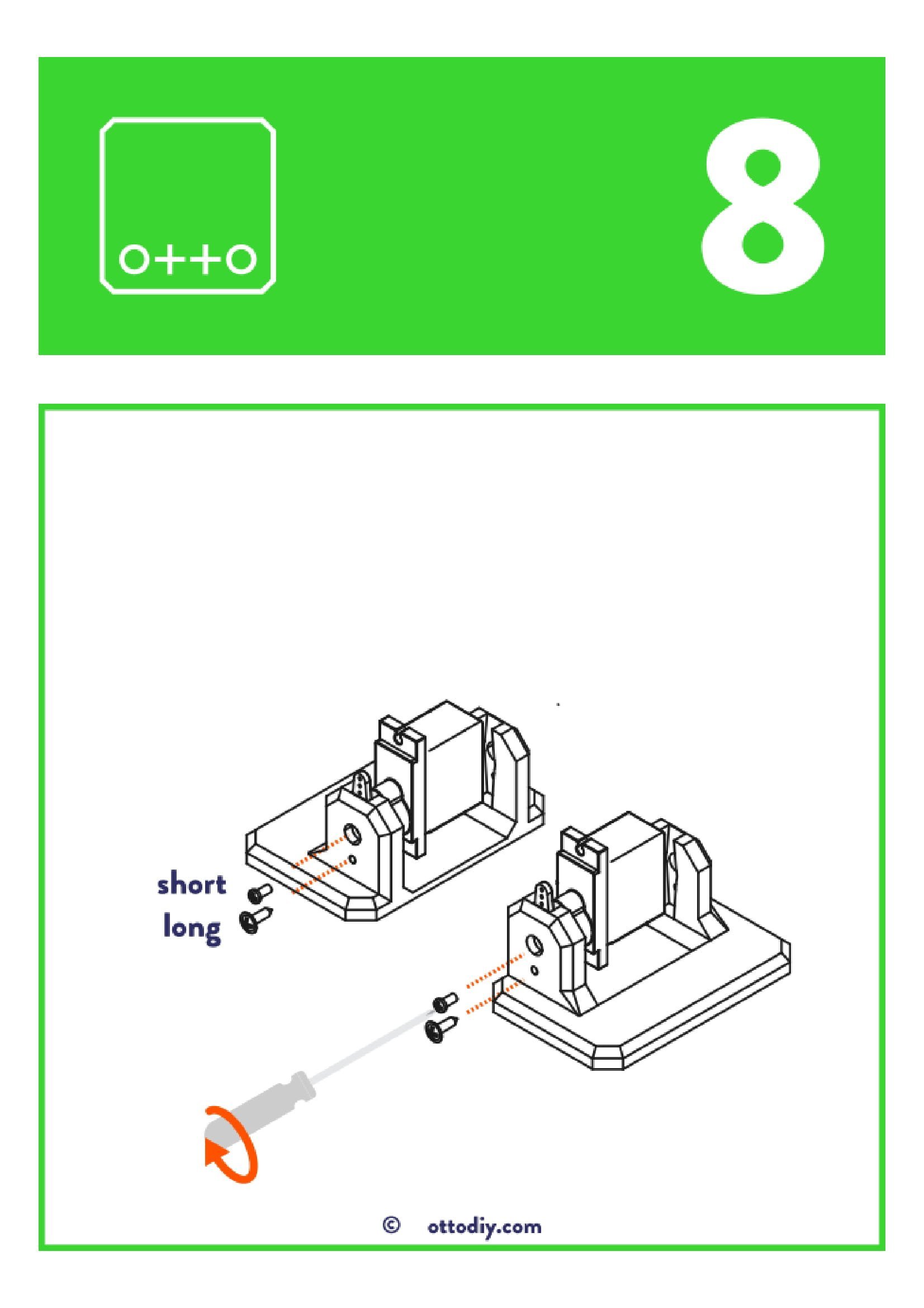
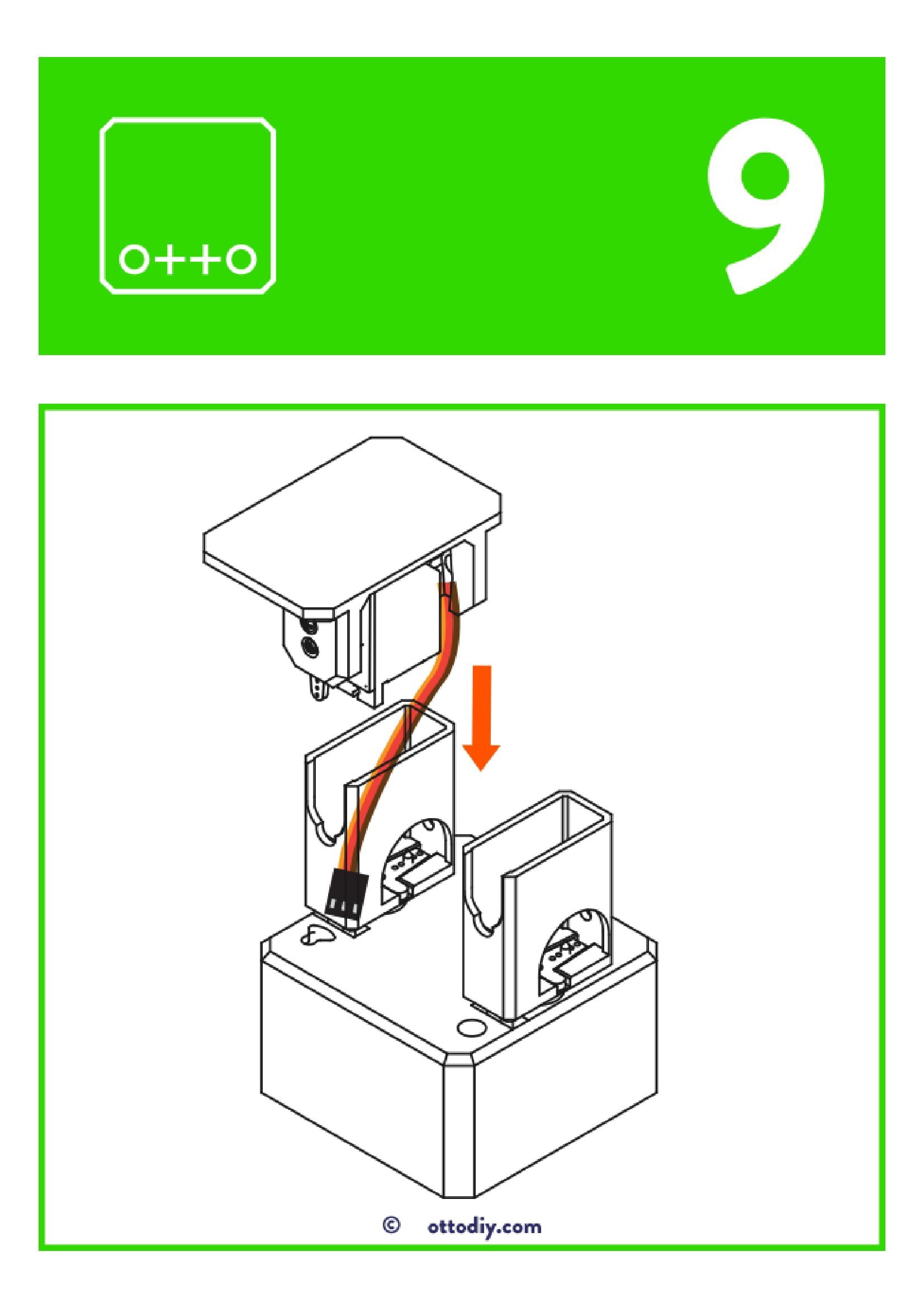
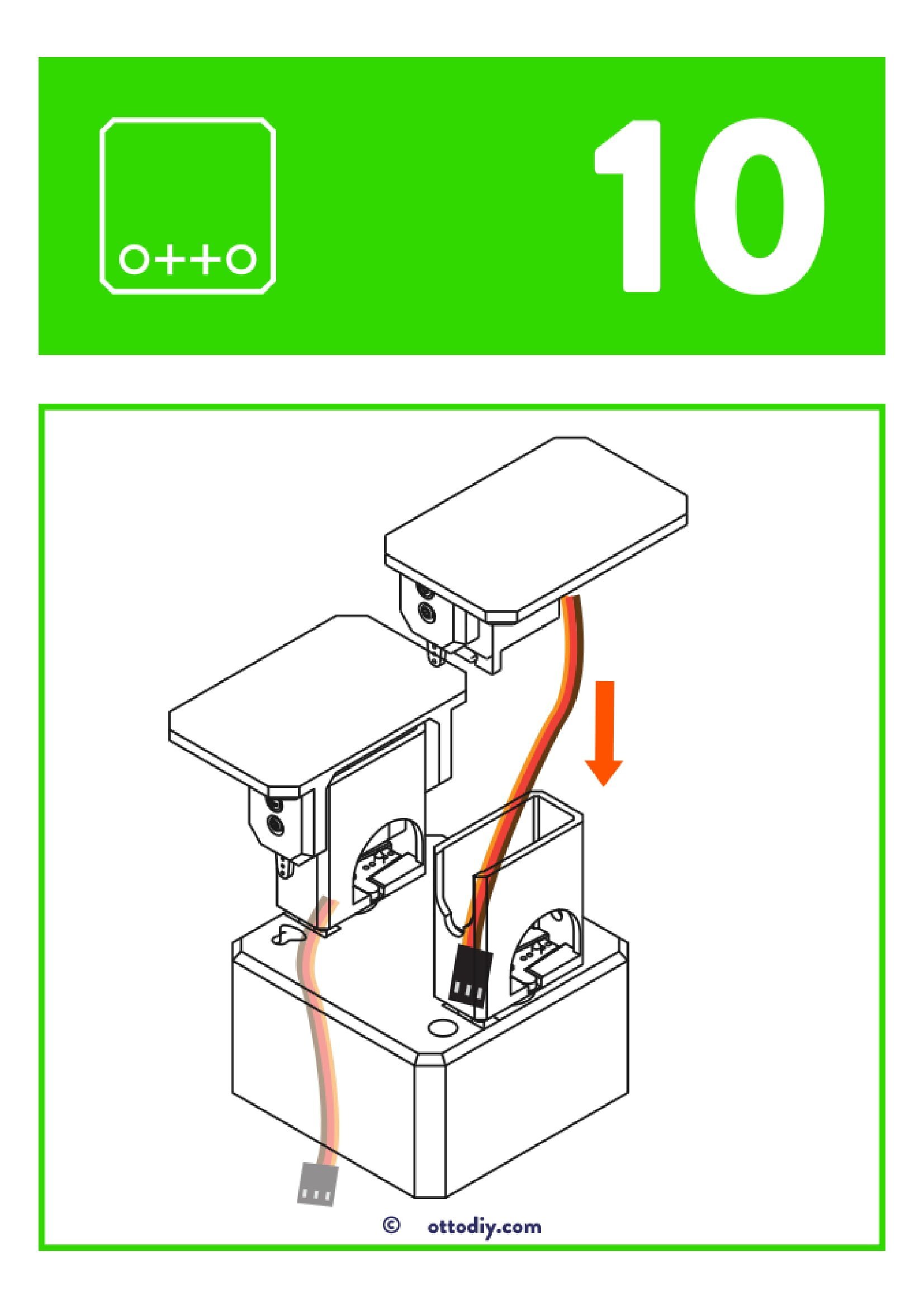
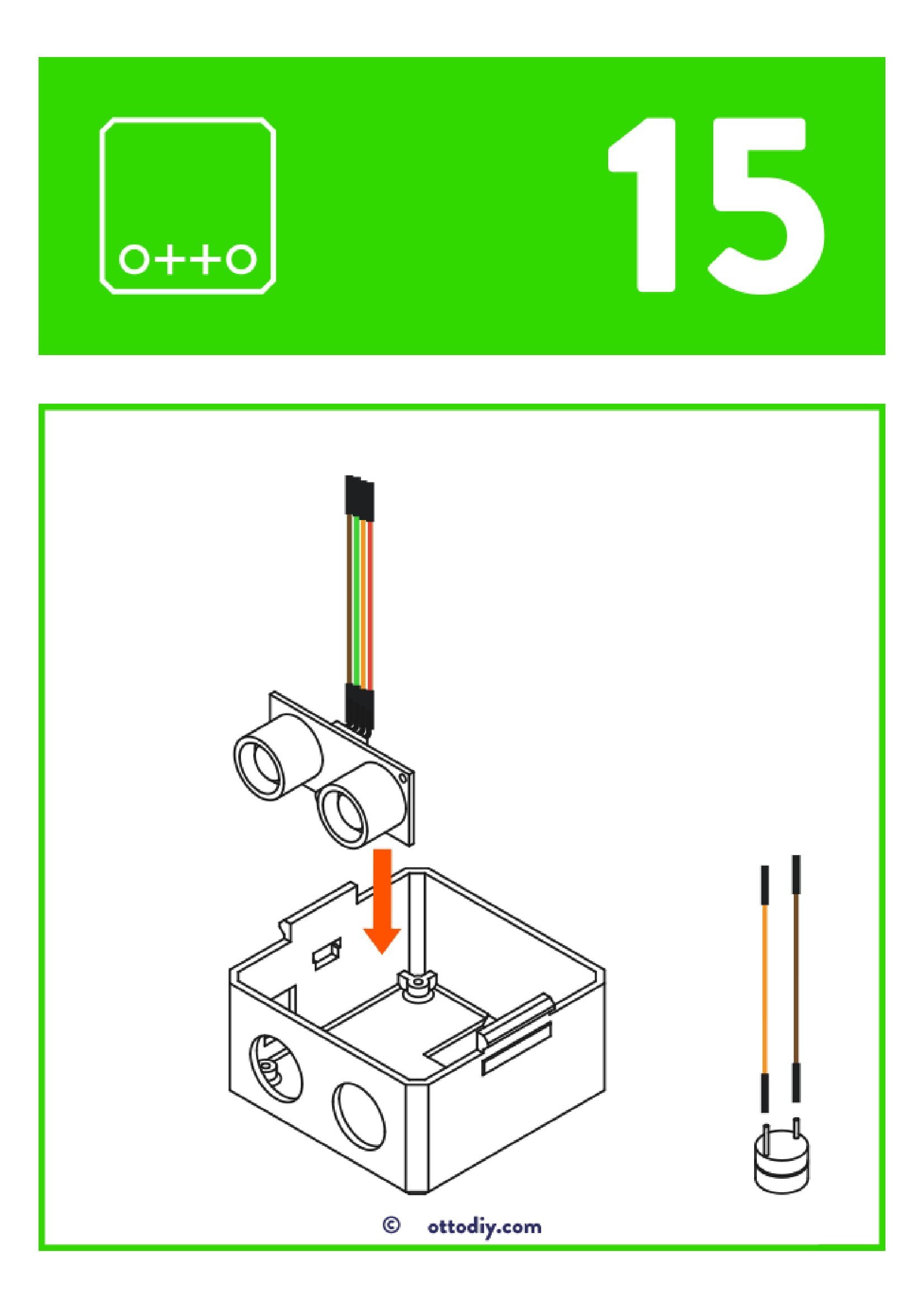
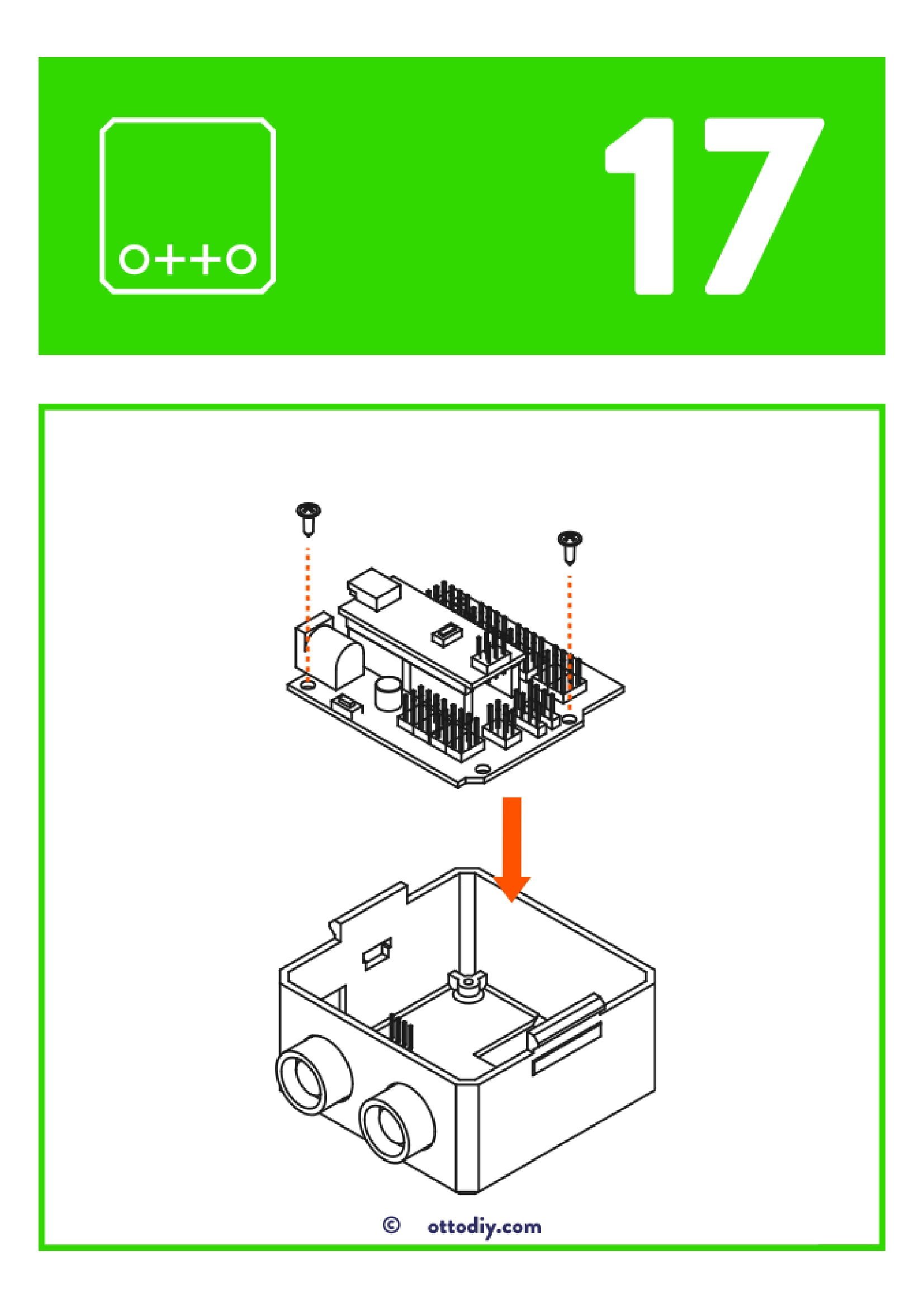
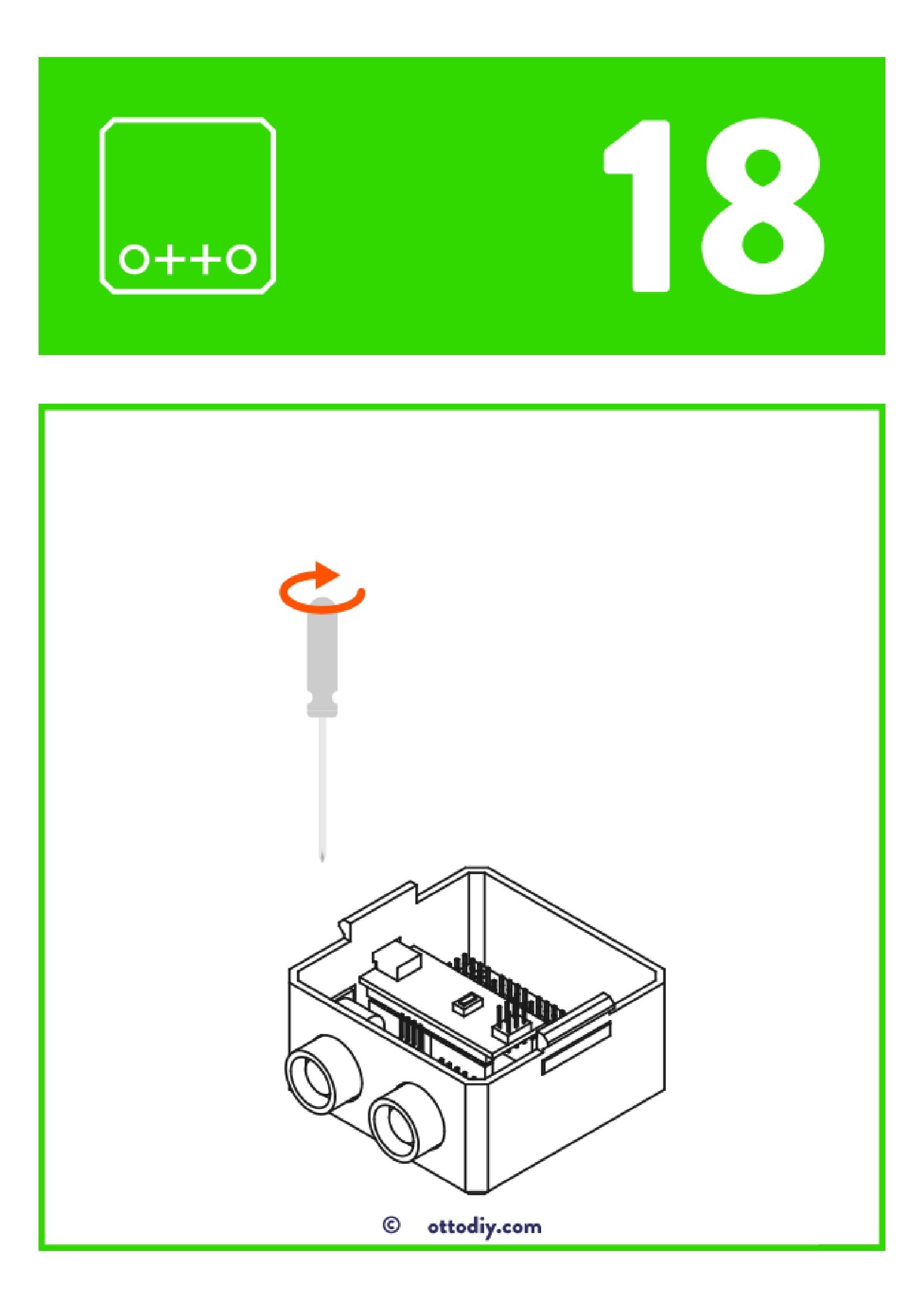
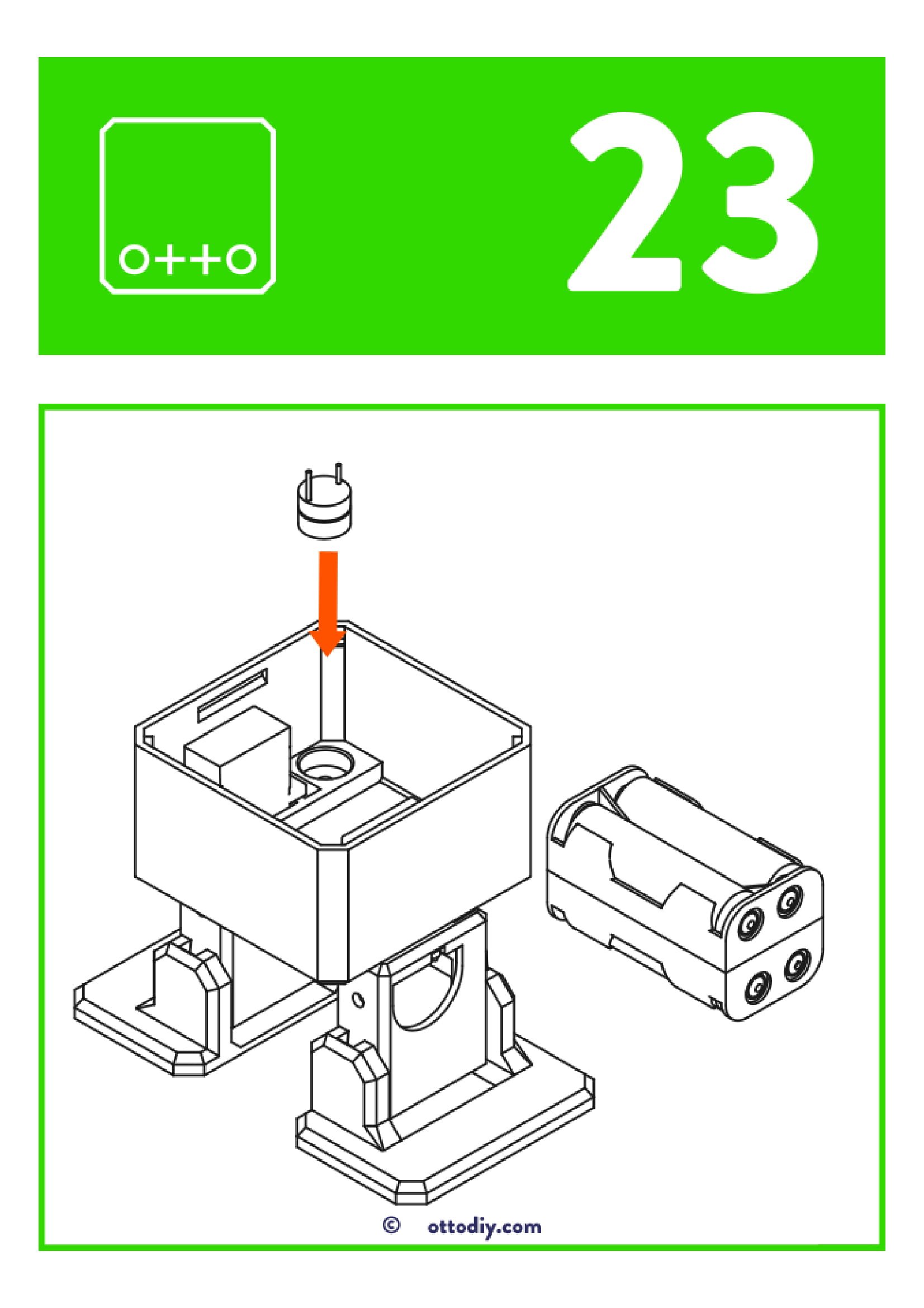
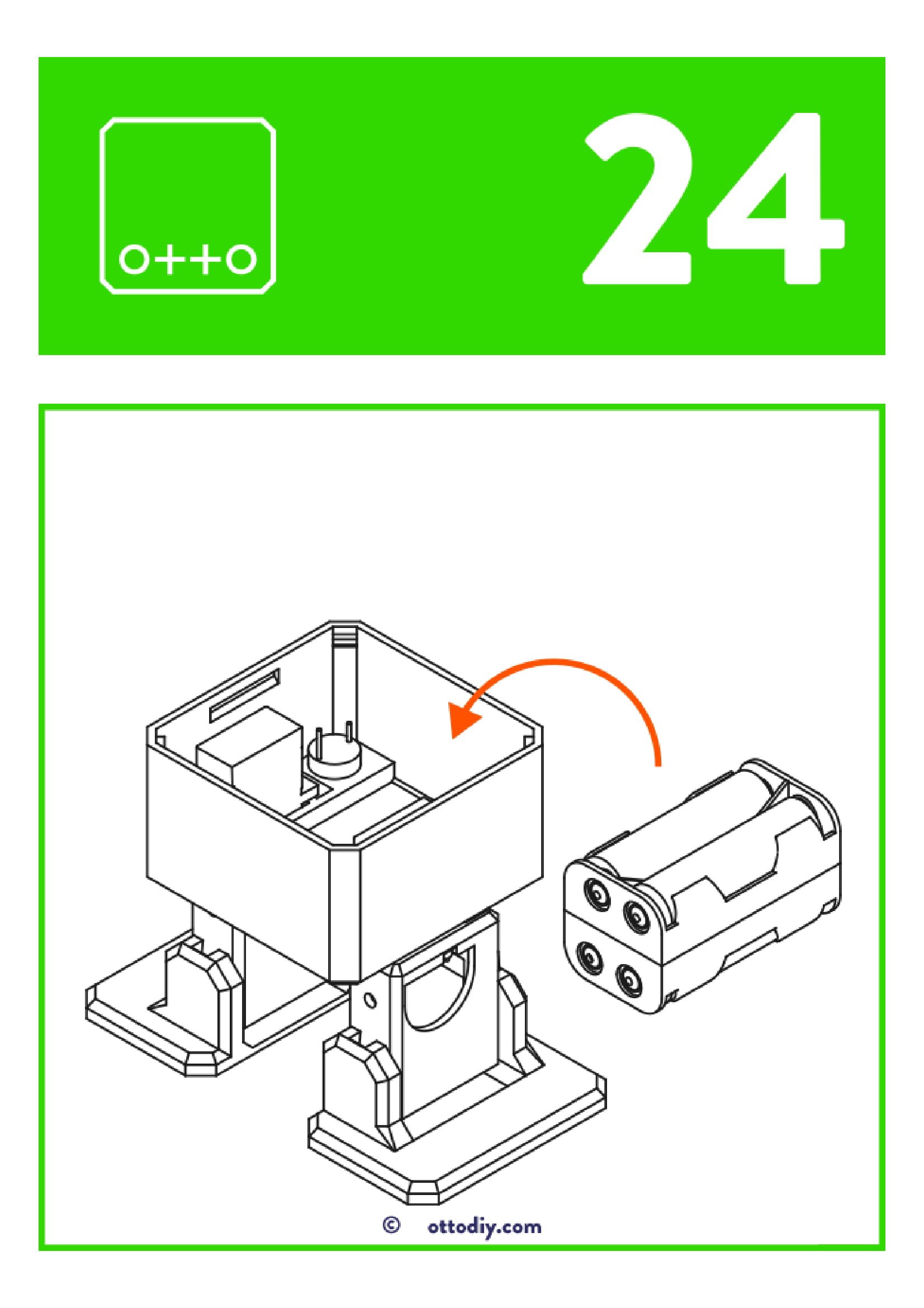
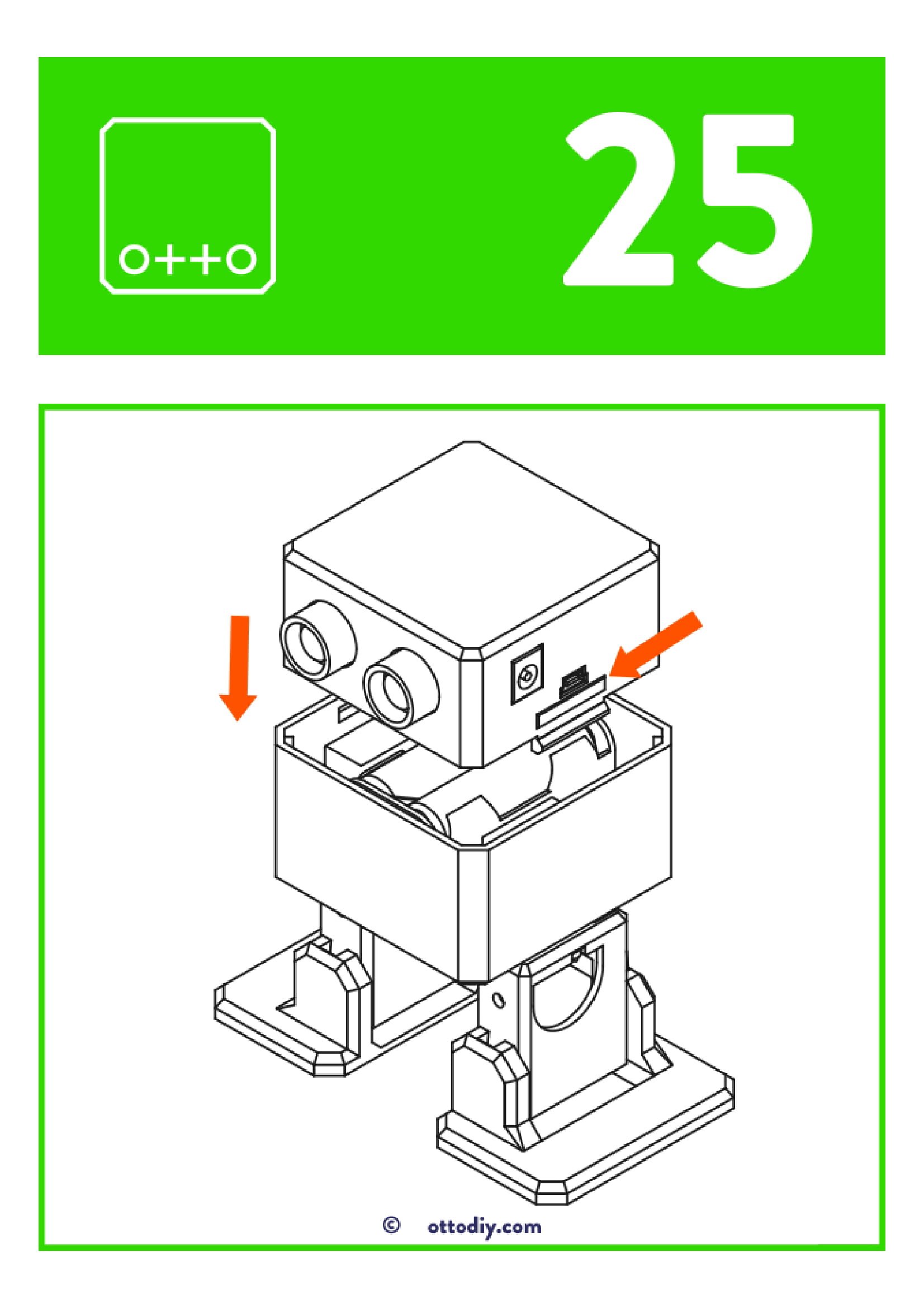
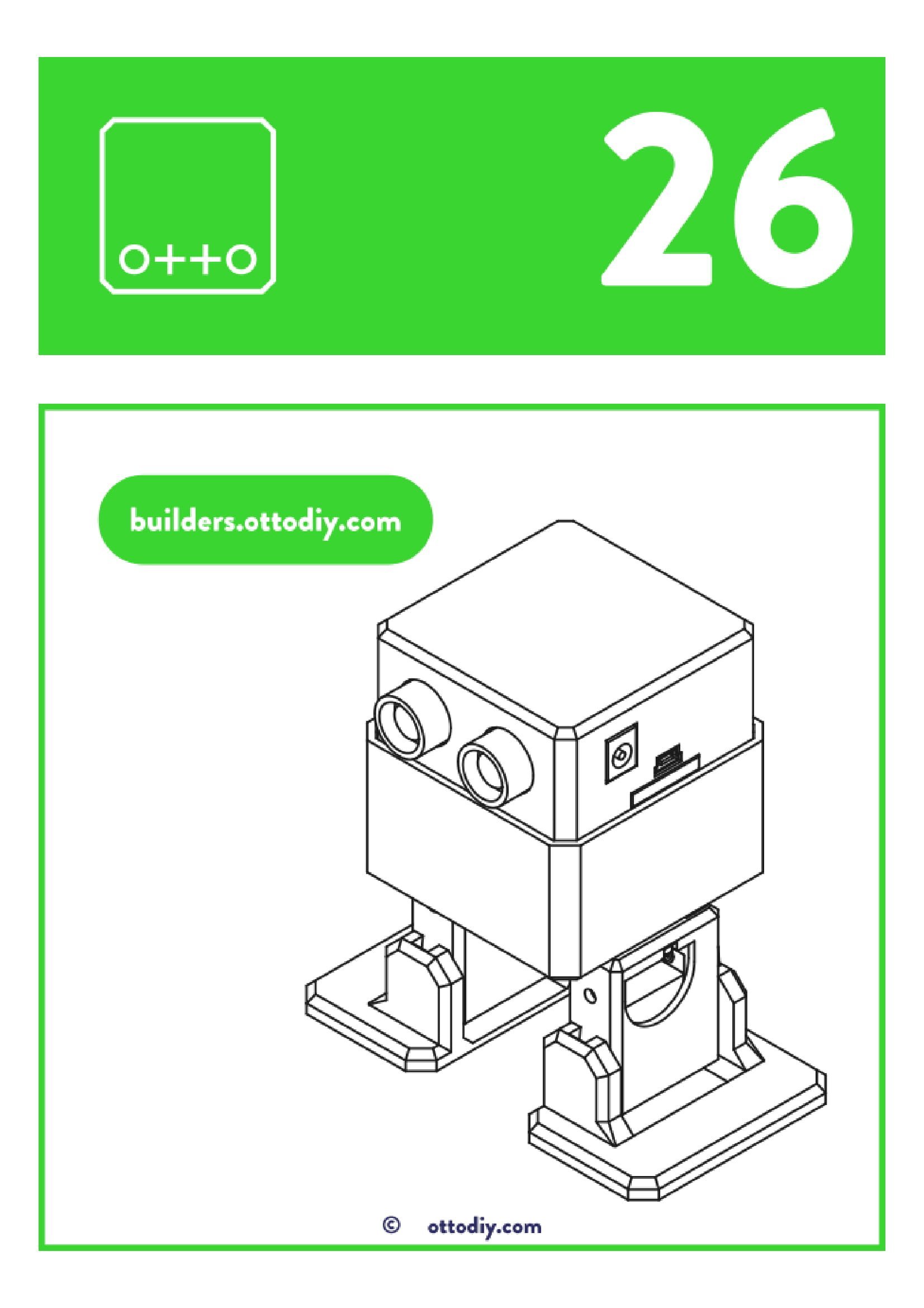
Aşağıdaki
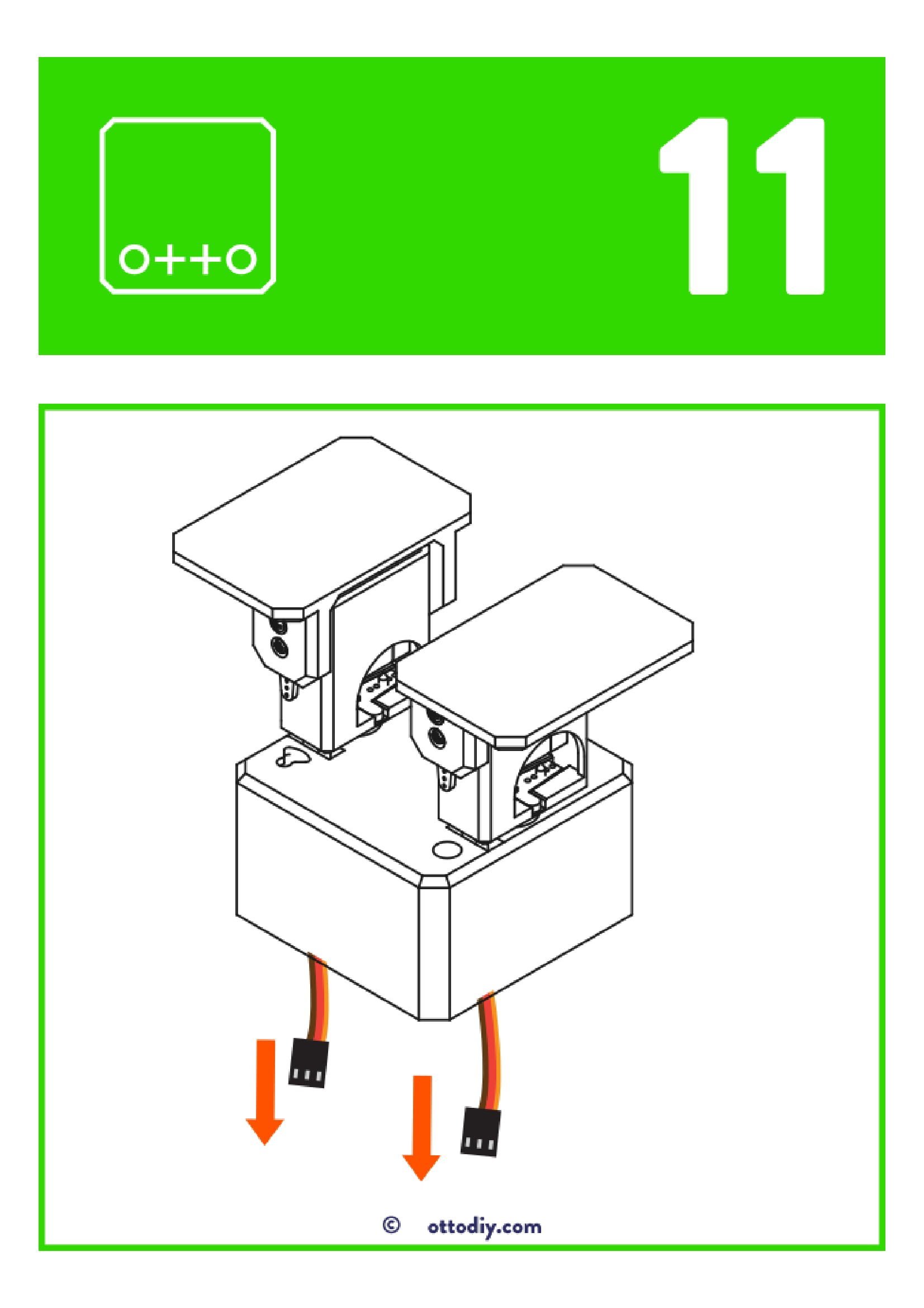
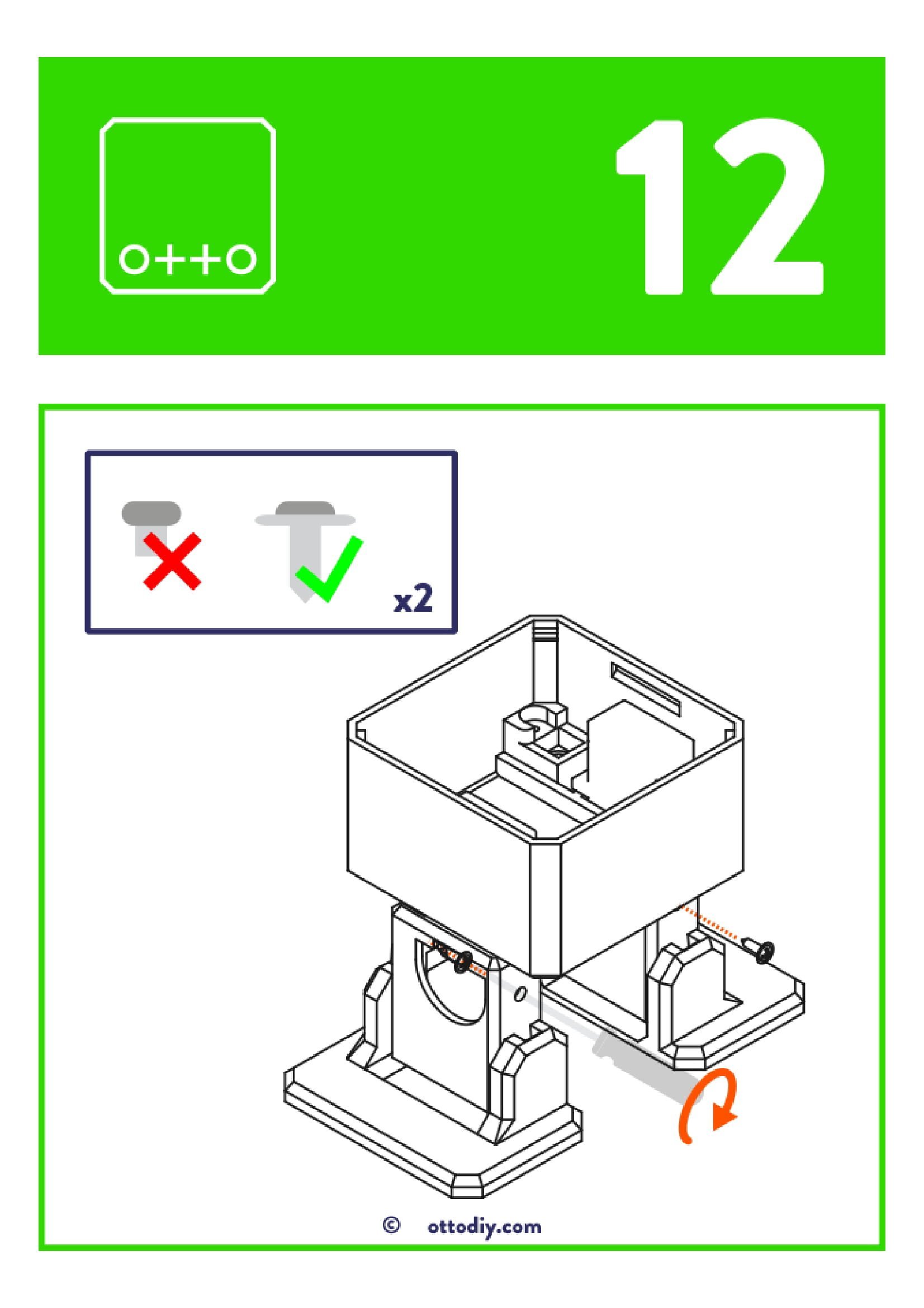
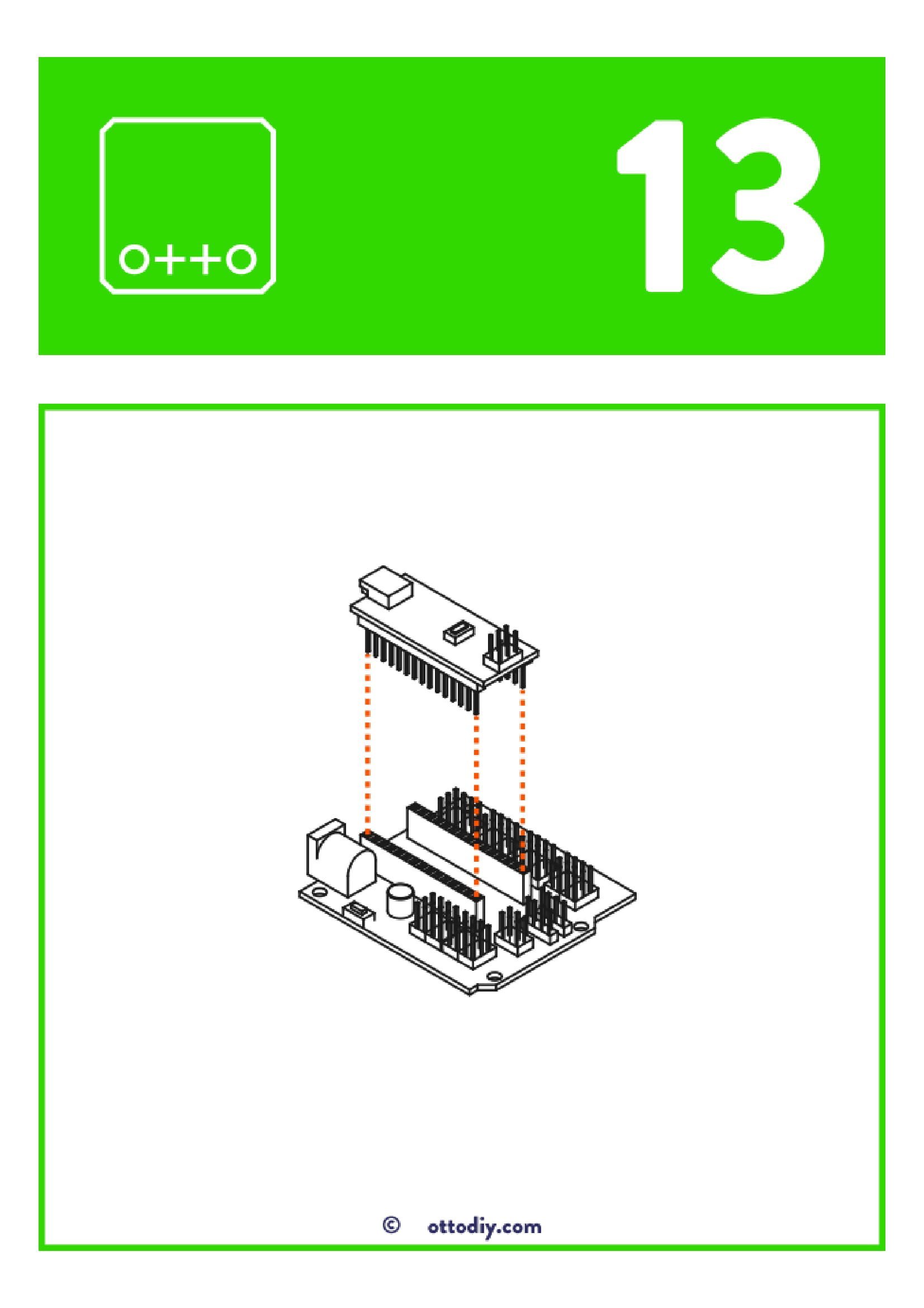
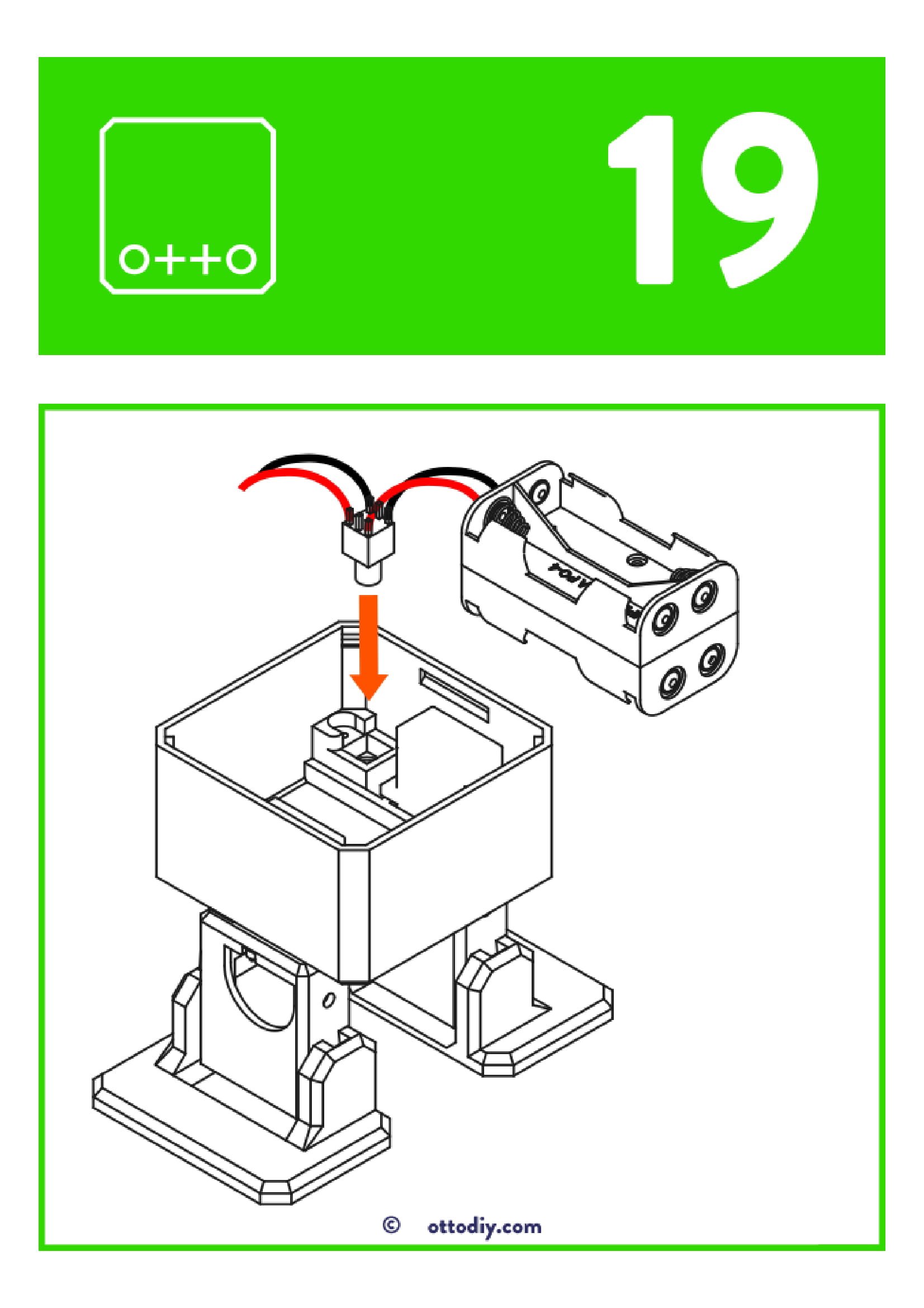
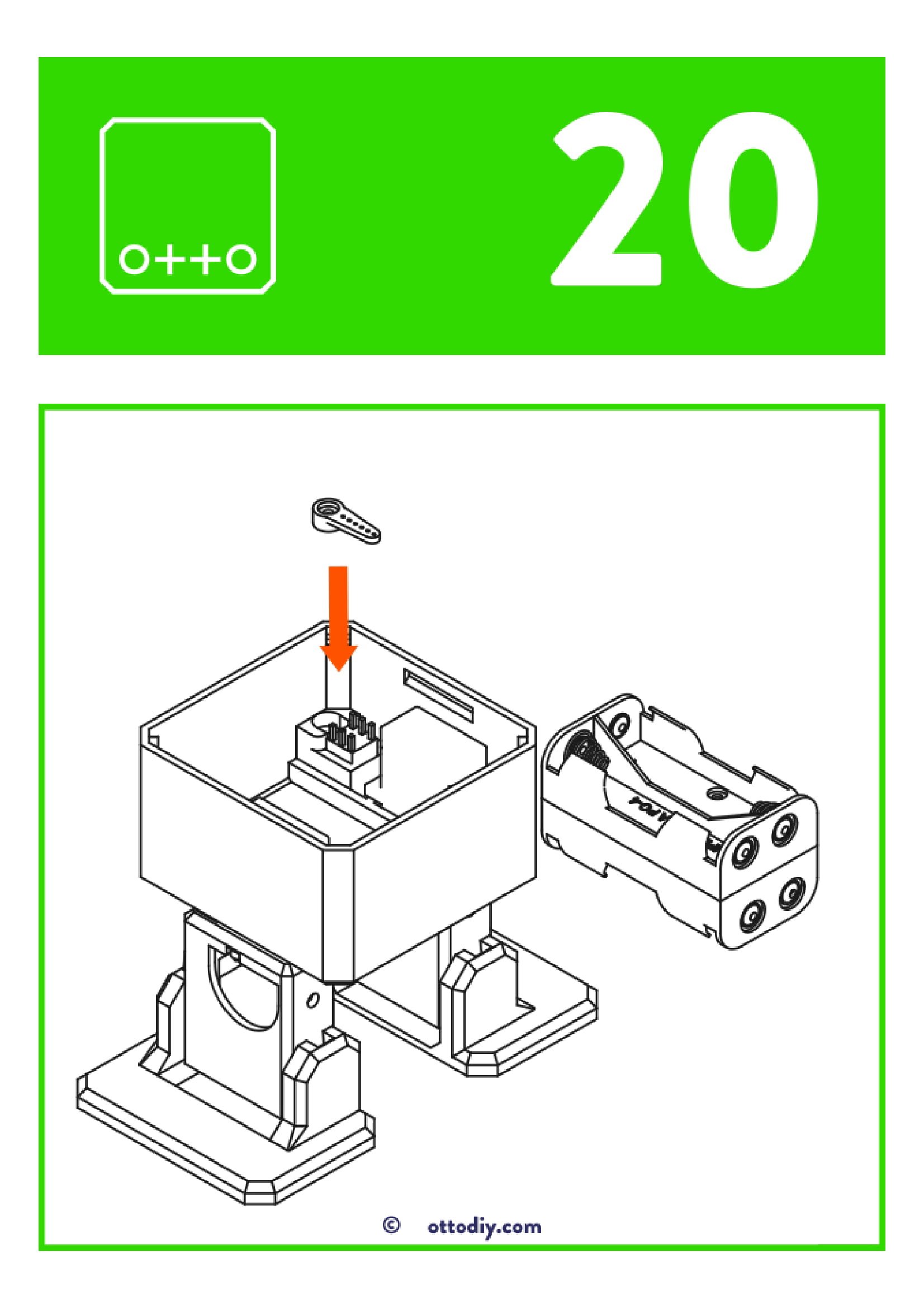
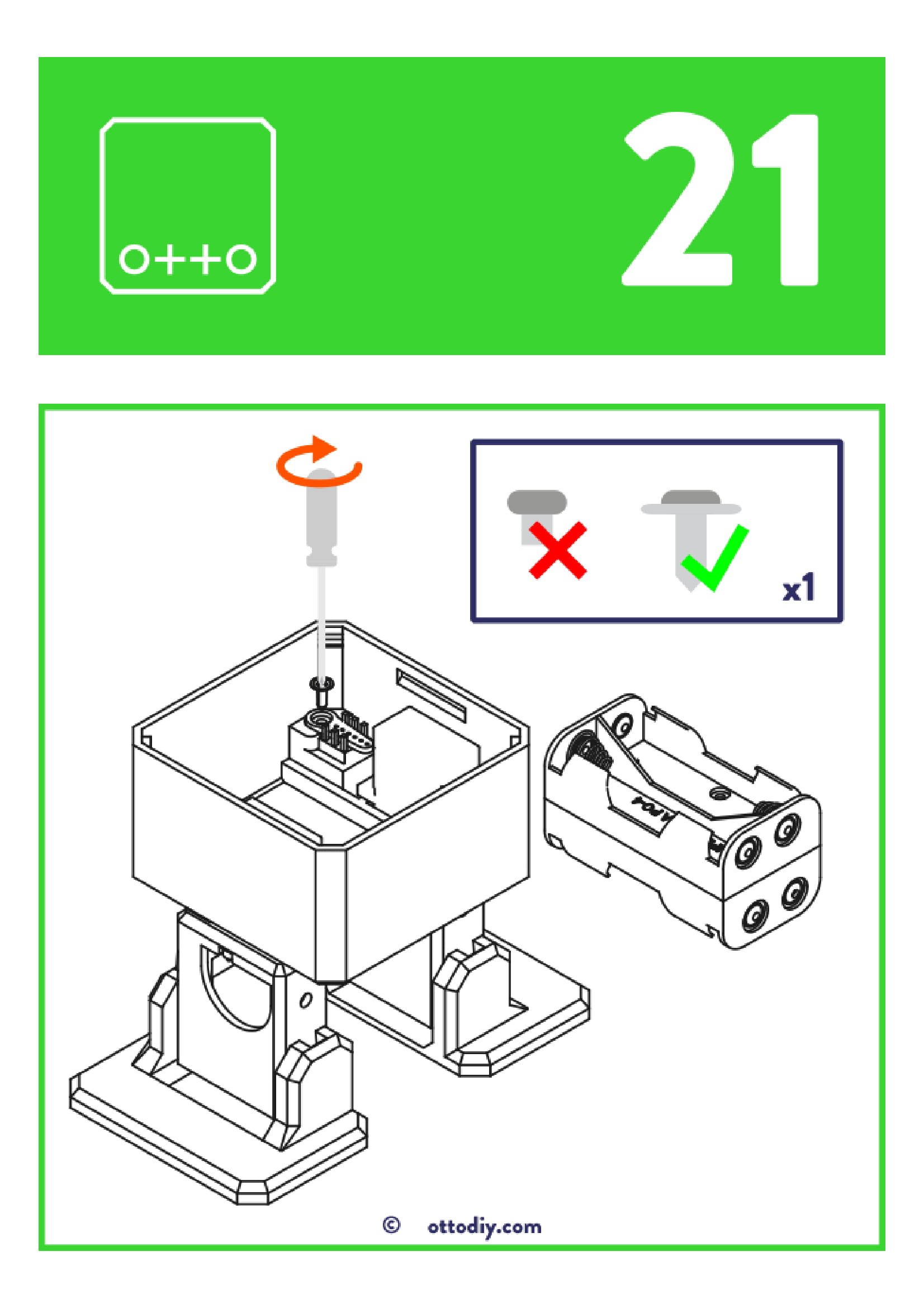
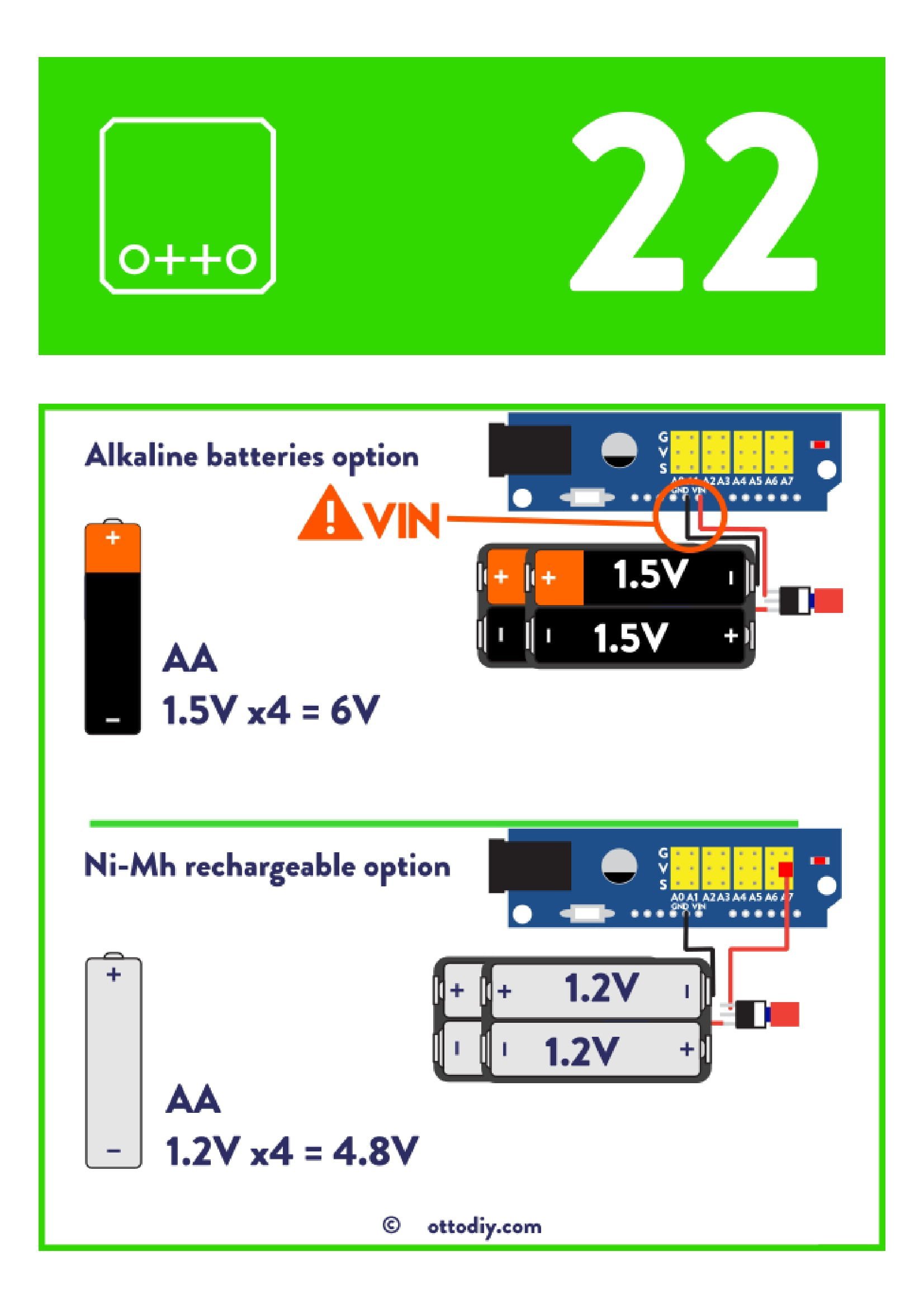
talimatları sırası ile uygulayarak robotumuzu oluşturalım.
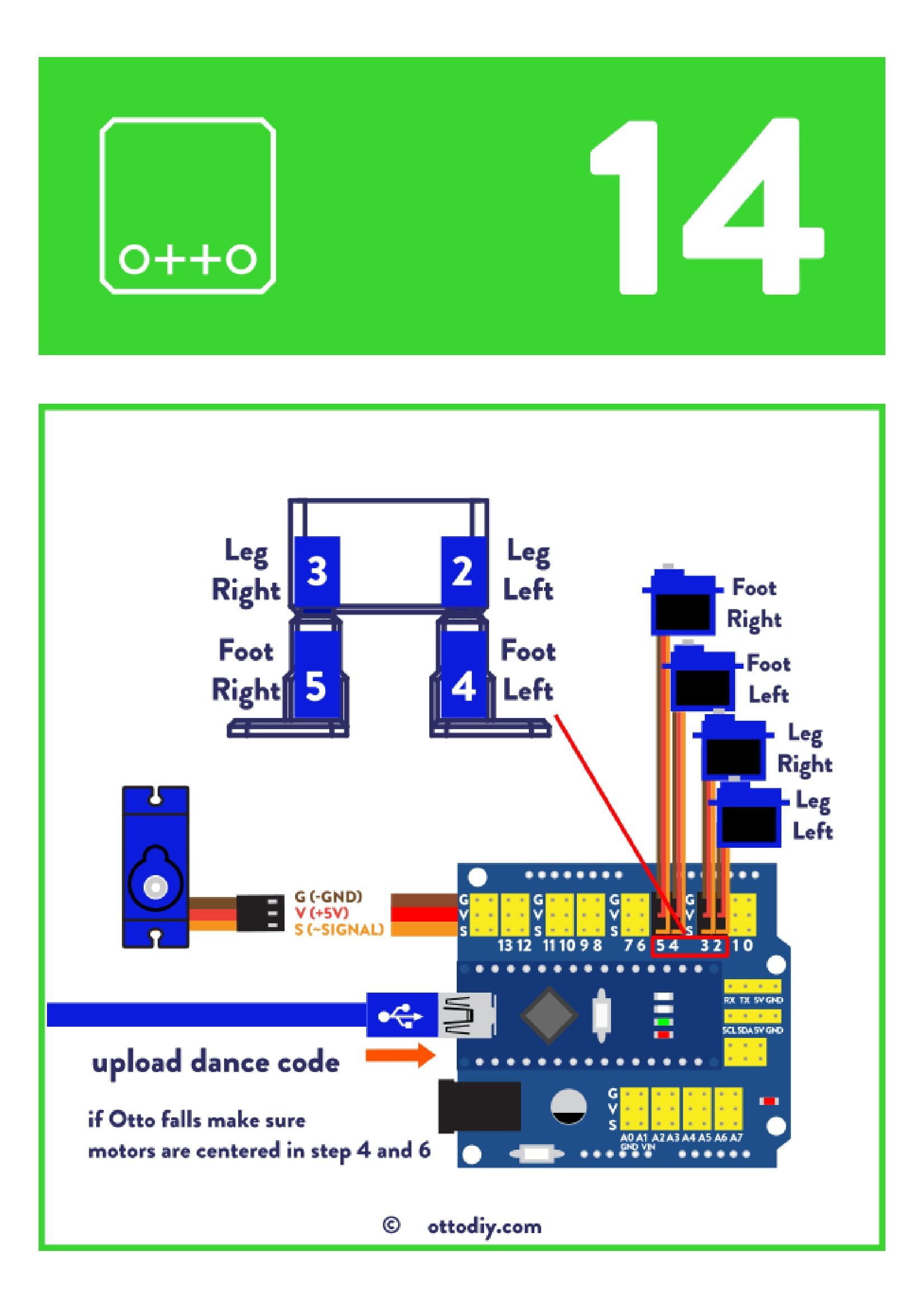
Otto robotun montajı bitince aşağıdaki kodu yükleyerek engel gördüğünde duran ve ses çıkaran bir şekilde robotumuzu hareket ettirebiliriz.
//----------------------------------------------------------------
//-- Basic Otto´s setup
//-- You can add functions, gestures or sounds in loop
//-- https://github.com/OttoDIY
//-- CC BY SA (http://ottodiy.com)
//-- 04 December 2016
//-- Adapted Pablo García pabloeweb@gmail.com 01 May 2017
//-----------------------------------------------------------------
#include
#include
#include
#include
Otto Otto; //This is Otto!
//---------------------------------------------------------
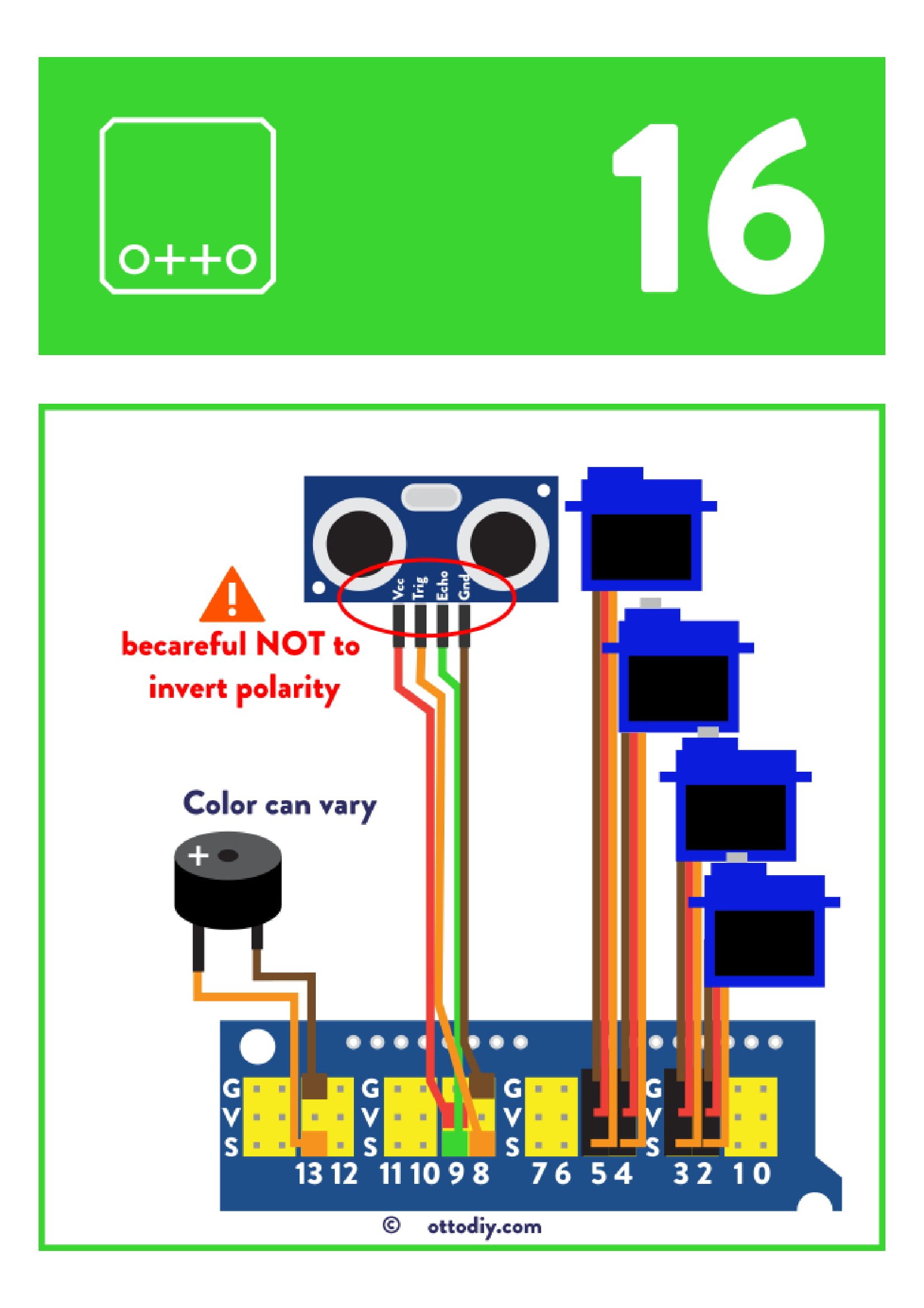
//-- First step: Make sure the pins for servos are in the right position
/*
---------------
| O O |
|---------------|
YR 3==> | | <== YL 2
---------------
|| ||
RR 5==> ----- ------ <== RL 4
|----- ------|
*/
#define PIN_YL 2 //servo[2]
#define PIN_YR 3 //servo[3]
#define PIN_RL 4 //servo[4]
#define PIN_RR 5 //servo[5]
/*SOUNDS******************
* S_connection S_disconnection S_buttonPushed S_mode1 S_mode2 S_mode3 S_surprise S_OhOoh S_OhOoh2 S_cuddly
* S_sleeping S_happy S_superHappy S_happy_short S_sad S_confused S_fart1 S_fart2 S_fart3
*/
/*MOVEMENTS LIST**************
* dir=1---> FORWARD/LEFT
* dir=-1---> BACKWARD/RIGTH
* T : amount of movement. HIGHER VALUE SLOWER MOVEMENT usually 1000 (from 600 to 1400)
* h: height of mov. around 20
jump(steps=1, int T = 2000);
walk(steps, T, dir);
turn(steps, T, dir);
bend (steps, T, dir); //usually steps =1, T=2000
shakeLeg (steps, T, dir);
updown(steps, T, HEIGHT);
swing(steps, T, HEIGHT);
tiptoeSwing(steps, T, HEIGHT);
jitter(steps, T, HEIGHT); (small T)
ascendingTurn(steps, T, HEIGHT);
moonwalker(steps, T, HEIGHT,dir);
crusaito(steps, T, HEIGHT,dir);
flapping(steps, T, HEIGHT,dir);
/*GESTURES LIST***************
OttoHappy OttoSuperHappy OttoSad OttoSleeping OttoFart OttoConfused OttoLove OttoAngry
OttoFretful OttoMagic OttoWave OttoVictory OttoFail*/
///////////////////////////////////////////////////////////////////
//-- Global Variables -------------------------------------------//
///////////////////////////////////////////////////////////////////
bool obstacleDetected = false;
int distance = 0;
///////////////////////////////////////////////////////////////////
//-- Setup ------------------------------------------------------//
///////////////////////////////////////////////////////////////////
void setup(){
//Set the servo pins
Otto.init(PIN_YL,PIN_YR,PIN_RL,PIN_RR,true);
Otto.sing(S_connection); //Otto wake up!
Otto.home();
delay(50);
}
///////////////////////////////////////////////////////////////////
//-- Principal Loop ---------------------------------------------//
//--Uncomment lines or add you own-------------------------------//
///////////////////////////////////////////////////////////////////
void loop() {
//OBSTACLE MODE ON!!!!
obstacleMode();
/*Otto.walk(2,1000,1); //2 steps FORWARD
Otto.walk(2,1000,-1); //2 steps BACKSWARD
Otto.playGesture(OttoFretful);
Otto.home();
Otto.sing(S_sleeping);
delay(1000);
Otto.turn(2,1000,1);//2 steps turning RIGHT
delay(50);
Otto.turn(2,1000,-1);//2 steps turning RIGHT
delay(50);
Otto.moonwalker(3, 1000, 25, 1);
Otto.home();
Otto.bend (1, 2000, 1);
Otto.home();
Otto.ascendingTurn(1, 2000, 22);
Otto.home();
Otto.updown(1, 2000, 22);
Otto.home();
*/
}
///////////////////////////////////////////////////////////////////
//-- Function to avoid obstacles
void obstacleMode(){
distance = Otto.getDistance();
if(distance<15){
Otto.sing(S_surprise);
Otto.walk(2,1300,-1);
Otto.turn(3,1000,-1);
delay(50);
}
else{
Otto.walk(2,1000,1);
}
}